



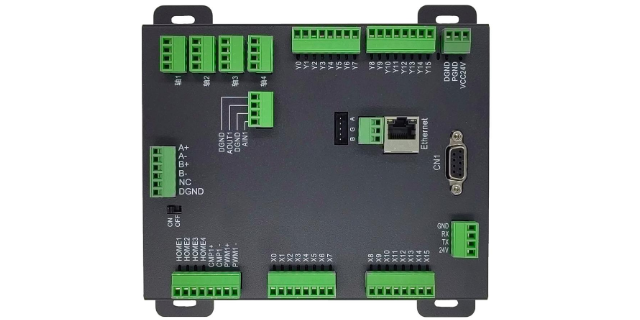
博派ETH_NEC控制卡提供了VC++及C#和Delphi以及VB下的動態庫,用戶可利用動態庫提供的API完成板卡打開、關閉、IO輸入輸出、電機點位/速度/插補/硬件捕獲/電子齒輪/比較輸出等運動控制功能。Labview下也可以通過調用C++動態庫的方式使用。同時板卡支持Linux、Android、iOS、Wince、Python、QT等開發環境及語言。支持點位運動、速度控制、直線、圓弧、連續軌跡插補,支持速度前瞻。硬件捕獲、電子齒輪/電子凸輪、位置比較輸出。支持PT模式與刀向跟隨。PC和手持編程器提供給用戶編程使用,為用戶提供了方便的編程界面。溫州博派運動控制器
中國作為世界上經濟發展快的國家之一,隨著工業化進程的不斷深化,中國運動控制市場一直保持高速增長的態勢,各個行業不斷出現新型數控設備。新型數控設備的運動控制需求以及傳統數控設備的技術升級換代需求,都對運動控制市場提供了強大的發展動力。一批本土企業通過技術積累、專研于細分行業從而突出重圍、嶄露頭角,獲得了一定的競爭優勢。國產經濟型數控系統由于順應了大多數中國用戶的實際使用水平和機床制造企業數控技術配套要求,并具有一定價格優勢,得到了廣大用戶的認同,已形成了規模優勢。2018年中國運動控制器市場規模達到73.58億元,小幅增長3.5%,未來在數控領域,在國家政策的大力支持下,通過自主研發、工程化、產業化攻關,我國數控系統的開發和成果轉化能力得到了提高,具有廣闊的發展空間,預計2025年中國運動控制器市場規模有望突破100億元。總線運動控制器品牌博派ETH_GAS系列運動控制卡支持點位和連續軌跡,多軸同步,直線、圓弧、螺旋線、空間直線插補等運動模式。
2020年基于PC的運動控制器、控制器、PLC控制器在中國的市場份額占比分別為34.6%、37.8%和27.6%,由于對運動控制的要求越來越高,基于PC運動控制器將逐步超過其他類型的運動控制器,占據越來越多的市場份額。
未來控制系統逐步在智能化、柔性化升級發展。在現代傳感技術、網絡技術、云計算等先進技術的基礎上,利用人工智能、大數據以及系統工程等方法和技術,智能控制已經深入到運動控制系統的各個方面,例如模糊控制、神經網絡控制、解耦控制等,運動控制系統可以實現分析、判斷、推理以及決策能力,從而實現制造設備各個部分的智能化,并終形成一個高度智能化的、柔性化的機械制造系統。
PLC系統一般由以下基本功能構成:多種控制功能、數據采集、存儲與處理功能、通信聯網功能、輸入/輸出接口調理功能、人機界面功能、編程、調試功能、控制功能邏輯控制:PLC具有與、或、非、異或和觸發器等邏輯運算功能,可以代替繼電器進行開關量控制。定時控制:它為用戶提供了若干個電子定時器,用戶可自行設定:接通延時、關斷延時和定時脈沖等方式。計數控制:用脈沖控制可以實現加、減計數模式,可以連接碼盤進行位置檢測。順序控制:在前道工序完成之后,就轉入下一道工序,使一臺PLC可作為多部步進控制器使用。數據采集、存儲與處理功能數學運算功能:基本算術:加、減、乘、除。擴展算術:平方根、三角函數和浮點運算。比較:大于、小于和等于。數據處理:選擇、組織、規格化、移動和先入先出。模擬數據處理:PID、積分和濾波。輸入/輸出接口調理功能具有A/D、D/A轉換功能,通過I/O模塊完成對模擬量的控制和調節。位數和精度可以根據用戶要求選擇。連續插補二維是指以一個平面為基準,進行多個點的連續插補,實現更加復雜的運動軌跡控制。

插補運動插補常見的兩種方式是直線插補和圓弧插補。插補運動至少需要兩個軸參與,進行插補運動時,將規劃軸映射到相應的機臺坐標系中,運動控制器根據坐標映射關系,控制各軸運動,實現要求的運動軌跡。插補運動指令會存入運動緩沖區,再依次從運動緩沖區中取出指令執行,直到插補運動全部執行完。1.直線插補直線插補方式中,兩點間的插補沿著直線的點群來逼近。首先假設在實際輪廓起始點處沿X方向走一小段(給一個脈沖當量軸走一段固定距離),發現終點在實際輪廓的下方,則下一條線段沿Y方向走一小段,此時如果線段終點還在實際輪廓下方,則繼續沿Y方向走一小段,直到在實際輪廓上方以后,再向X方向走一小段,依此類推,直到到達輪廓終點為止。這樣實際輪廓是由一段段的折線拼接而成,雖然是折線,但每一段插補線段在精度允許范圍內非常小,那么此段折線還是可以近似看做一條直線段,這就是直線插補。通過專門的軟件,用戶可以直接設置運動控制卡的參數和監測運動設備的狀態。成都總線運動控制器廠家
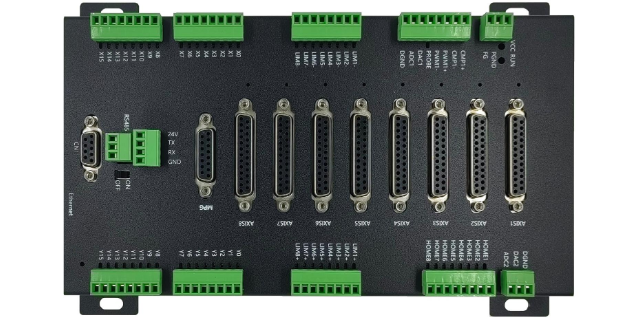
博派ETH_GAS控制卡支持多個并聯使用,可擴展至2000 個軸,可滿足所有應用場合。溫州博派運動控制器
運動控制器是“大腦”,驅動器是“心臟”,電機相當于 “手腳”。“大腦”運動控制器下達指令后,“心臟”驅動器將指令轉化為電流和電壓信號,驅動“手腳”電機旋轉,按照設定的力矩、速度、位置完成相應的運動。同時,電機上的傳感器經過信號處理將電機的實時信息反饋給控制器,控制器進行實時調整,從而保證整個系統的穩定運轉。運動控制系統的發展經歷了從直流到交流,從開環到閉環,從模擬到數字,再到基于PC的伺服控制網絡系統和基于網絡的運動控制的發展過程,目前以后兩種為主。溫州博派運動控制器