



運動控制卡是利用高性能微處理器及大規模可編程器件實現多個伺服電機的多軸協調控制的一種高性能的,專門用來滿足足一系列運動控制需求的(位移、速度、加速度等),基于PC機的上位控制單元。運動控制卡的原理是發出連續的、高頻率的脈沖串,通過改變發出脈沖的頻率來控制電機的速度,改變發出脈沖的數量來控制電機的位置,它的脈沖輸出模式包括脈沖/方向、脈沖/脈沖方式等。并且,依靠傳感器傳回的位置反饋,運動控制卡可以實時調整運動位置,糾正傳動過程中的誤差,從而做到高精度加工。東莞博派智能科技有限公司專注于運動控制技術研究和通用運動控制軟硬件產品的研發。鹽城博派運動控制卡
一、電子凸輪簡介1.1組成部分電子凸輪(ECAM)是利用構造的凸輪曲線來模擬機械凸輪,以達到機械凸輪系統相同的凸輪軸于主軸之間相對運動的軟件系統。通過控制器控制伺服電機來模擬機械凸輪的功能,不需要另外安裝機械結構。1.2工作原理電子凸輪屬于多軸同步運動。與機械齒輪一樣,電子凸輪需要主軸和從軸。若定義凸輪為主軸,推桿為從軸,那么凸輪的實質就是從軸對應主軸的一種函數關系。如下圖,機械凸輪按照凸輪的輪廓可以得出一段轉動角度與加工位置運動軌跡,此軌跡為弧線,將該段弧線分解成無數個直線軌跡,組合起來得到一串趨近于弧線運動軌跡,電子凸輪直接將此段軌跡運動參數裝入運動指令,即可控制軸走出目標軌跡。鹽城博派運動控制卡電子凸輪可以應用在諸如汽車制造、冶金、機械加工、紡織、印刷、食品包裝、水利水電等各個領域。

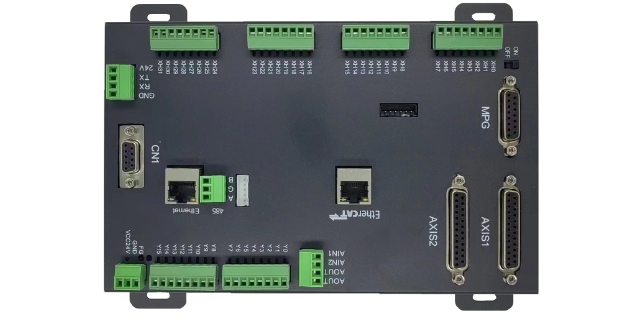
即便在其誕生的10年之后,EtherCAT的通信速度仍比快的CPU的運行速度還快,并且2003年使用EtherCAT的控制器到了2013年仍然可以在自動化設備上兼容使用–從某種意義上講,它已經打破摩爾定律10年有余(雖然應用的領域稍有差別)。這也就是說,單一版本的EtherCAT,即那個版本的EtherCAT就已足夠支撐現今大部分的工業場景,后來所有添加的東西都只是擴展,而非改型,真可謂叫“匠心級”產品,相比于當前某些企業吹的什么“現象級”產品,水平不知道高到哪里去了。東莞博派智能科技有限公司推出的ECAT_GAS2系列總線運動控制卡,同時支持EtherCAT和Ethernet,提供VC++/VB/C#/LABVIEW/LINUX/QT/DELPHI等動態庫和API.普通電腦甚至筆記本就能用,非常方便。同時支持點、線、圓弧、螺旋線插補,支持連續小線段速度前瞻。同時可以接入外部手輪,主卡本身有2路模擬量輸入和兩路模擬量輸出,非常方便。
2003年德國漢諾威工業博覽會,一家以做運動控制器出名的企業展臺前人頭攢動,展出的產品是一種全新的工業通訊協議。幾乎整個從事自動化行業相關的參會者都訪問過這家的展位并為此感到震驚,有人直接斷言這是一種具有前瞻性的技術,是前沿控制理念的新生代產物。這家公司就是德國倍福自動化有限公司(Beckhoff),而這個被譽為具有前瞻性的技術叫做EtherCAT(用于控制自動化技術的以太網)。后來的故事一如第一次見到EtherCAT的人們預料的那樣,這種可以稱得上是“前瞻性”的工業通訊協議,憑借其應用的多樣性,開放性、高效率,在包括包裝機、全鋼工廠、機器人、切割系統、風洞和風能系統等應用程序中得以使用。國內的EtherCAT總線運動控制卡目前做的比較好的是東莞博派智能科技有限公司的ECAT_GAS2系列,使用簡單,支持VC++/C#/VB/DELPHI/QT/LINUX/LABVIEW等,普通電腦甚至筆記本都能用,非常方便。ECAT_GAS2運動控制卡是一款由東莞博派智能科技有限公司推出的新型的EtherCAT總線運動控制卡。
運動控制主要涉及步進電機、伺服電機的控制,控制結構模式一般是:控制裝置+驅動器+(步進或伺服)電機。控制裝置可以是PLC系統,也可以是自動化裝置(如運動控制器、運動控制卡)。PLC系統作為控制裝置時,雖具有PLC系統的靈活性、一定的通用性,但對于精度較高,如-插補控制,反應靈敏的要求時難以做到或編程非常困難,而且成本可能較高。隨著技術進步和技術積累,運動控制器應運而生了,它把一些普遍性的、特殊的運動控制功能固化在其中—如插補指令,用戶只需組態、調用這些功能塊或指令,這樣減輕了編程難度,性能、成本等方面也有優勢。也可以這樣理解:PLC的使用是一種普通的運動控制裝置。運動控制器是一種特殊的PLC,專職用于運動控制。東莞博派是中國工控市場較早的參與者之一,長期專注于機械設備制造行業自動化水平的提高。鹽城博派運動控制卡
運動控制卡是一種硬件設備,通常是插入在計算機的擴展插槽或者通過接口連接計算機的外部設備。鹽城博派運動控制卡
C的運動控制是指PLC系統通過控制運動設備的運動軸,實現精確、穩定和可編程的運動控制功能。它可以控制運動設備(如電機、伺服驅動器等)的位置、速度和加速度等參數,以實現所需的運動軌跡和運動邏輯。選取支持運動控制的PLC時,以下是一些關鍵因素和考慮事項:(1)運動控制功能:確保PLC具備完善的運動控制功能,包括軸控制、軌跡規劃、速度和加速度控制等。PLC應支持多個運動軸的控制,并能滿足具體應用的運動控制需求。(2)接口和通信能力:PLC需要提供與運動設備(如伺服驅動器、編碼器等)的接口和通信能力。常見的接口包括模擬量輸入/輸出、數字量輸入/輸出、編碼器反饋接口等。同時,PLC應支持常見的通信協議,如EtherCAT、CANopen等,以便與運動控制設備進行數據交換和協同控制。(3)編程和配置工具:PLC選型時,要考慮其編程和配置工具的友好性和便利性。一些PLC廠商提供專門的運動控制編程語言或函數塊,簡化了運動控制程序的開發和調試過程。(4)性能和實時性:選擇具備足夠的性能和實時性能的PLC,以滿足高速、精確的運動控制要求。性能指標包括掃描周期、運動軸數量、數據處理能力等。鹽城博派運動控制卡